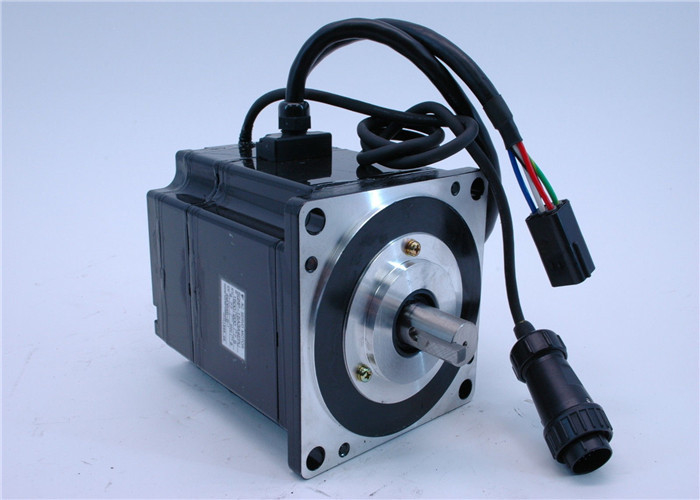
Servo Motor Elétrico Yaskawa 4.77Nm Motores-AC Servo SGMP-15A3A4EPU 3000RMP
Detalhes rápidos
Lugar de origem:
Japão, Japão
Marca:
Yaskawa
Número do modelo:
SGMP-15A3A4EPU
Uso:
Bicicleta elétrica
Certificação:
UL
Modelo:
Servo Motor, Servo Motor
Construção:
Ímã permanente
Comutação:
Escovar
Recurso de proteção:
à prova de gotejamento
Velocidade (RPM):
3000 RMP
Corrente Contínua (A):
7,5A
Eficiência:
IE 1
Marca:
WTL
Modelo:
SGMP-15A3A4EPU
Poder:
750W
Tensão:
200V
Atual:
7,5A
Opções:
com freio
Series:
SGMP
OUTROS PRODUTOS SUPERIORES
| Yasakawa Motor, Motorista SG- |
Mitsubishi Motor HC-,HA- |
| Módulos Westinghouse 1C-,5X- |
Emerson VE-,KJ- |
| Honeywell TC-,TK- |
Módulos GE IC - |
| Fanuc motor A0- |
Yokogawa transmissor EJA- |
Pessoa de contato: Ana
E-mail: sabedorialongkeji@163.com
Celular: +0086-13534205279
PRODUTOS SIMILARES
SGMP-01U312 SGMP01U312 SERVO MOTOR Yaskawa
SGMP-01U314CM SGMP01U314CM SERVO MOTOR Yaskawa
SGMP-01U314EM SGMP01U314EM SERVO MOTOR Yaskawa
SGMP-01U314M SGMP01U314M SERVO MOTOR Yaskawa
SGMP-01U3AP08 SGMP01U3AP08 SERVO MOTOR Yaskawa
SGMP-01U3G46 SGMP01U3G46 SERVO MOTOR Yaskawa
SGMP-01U3S SGMP01U3S SERVO MOTOR Yaskawa
SGMP-02A312 SGMP02A312 SERVO MOTOR Yaskawa
SGMP-02A314 SGMP02A314 SERVO MOTOR Yaskawa
SGMP-02A3G26C SGMP02A3G26C SERVO MOTOR yaskawa
SGMP-02A3HA12 SGMP02A3HA12 SERVO MOTOR Yaskawa
SGMP-02A3TE21 SGMP02A3TE21 SERVO MOTOR Yaskawa
SGMP-02A3TE33 SGMP02A3TE33 SERVO MOTOR Yaskawa
SGMP-02A8YR11 SGMP02A8YR11 SERVO MOTOR Yaskawa
SGMP-02A8YR21 SGMP02A8YR21 SERVO MOTOR Yaskawa
SGMP-02AW12 SGMP02AW12 SERVO MOTOR Yaskawa
SGMP-02AW14 SGMP02AW14 SERVO MOTOR Yaskawa
SGMP-02AW16 SGMP02AW16 SERVO MOTOR Yaskawa
SGMP-02AW16CM SGMP02AW16CM SERVO MOTOR Yaskawa
SGMP-02AW16S SGMP02AW16S SERVO MOTOR Yaskawa
SGMP-02Awg16b SGMP02Awg16b SERVO MOTOR Yaskawa
SGMP-02AWYR11 SGMP02AWYR11 2AMP 200W 200V Yaskawa
SGMP-02AWYR12 SGMP02AWYR12 2AMP 200V 200W 3000RPM 0,637NM Yaskawa
SGMP-02AXSWX SGMP02AXSWX SERVO MOTOR Yaskawa
SGMP-02B312 SGMP02B312 SERVO MOTOR Yaskawa
SGMP-02B314 SGMP02B314 SERVO MOTOR Yaskawa
SGMP-02B3G36 SGMP02B3G36 SERVO MOTOR Yaskawa
SGMP-02B3J22 SGMP02B3J22 SERVO MOTOR Yaskawa
SGMP-02BW12C SGMP02BW12C SERVO MOTOR Yaskawa
SGMP-02U314CM SGMP02U314CM AC 200W 200VAC 2.0AMP yaskawa
SGMP-02U314M SGMP02U314M SERVO MOTOR Yaskawa
SGMP-02U3YA11 SGMP02U3YA11 SERVO MOTOR Yaskawa
SGMP-02V312B SGMP02V312B SERVO MOTOR Yaskawa
SGMP-02V314T SGMP02V314T SERVO MOTOR Yaskawa
SGMP-03B312 SGMP03B312 SERVO MOTOR Yaskawa
SGMP-03B314 SGMP03B314 SERVO MOTOR Yaskawa
SGMP-03L314M SGMP03L314M 100V 300W yaskawa
SGMP-04A312 SGMP04A312 SERVO MOTOR Yaskawa
SGMP-04A314 SGMP04A314 SERVO MOTOR Yaskawa
SGMP-04A3A4 SGMP04A3A4 SERVO MOTOR Yaskawa
SGMP-04A3G32 SGMP04A3G32 SERVO MOTOR Yaskawa
SGMP-04A3G40 SGMP04A3G40 SERVO MOTOR Yaskawa
SGMP-04A3NA11 SGMP04A3NA11 SERVO MOTOR Yaskawa
SGMP-04A3TE31 SGMP04A3TE31 SERVO MOTOR Yaskawa
SGMP-04A3TE32 SGMP04A3TE32 SERVO MOTOR Yaskawa
SGMP-04A3TE41 SGMP04A3TE41 SERVO MOTOR Yaskawa
SGMP-04A3TE81 SGMP04A3TE81 SERVO MOTOR Yaskawa
SGMP-04AW12 SGMP04AW12 SERVO MOTOR Yaskawa
SGMP-04AW160 SGMP04AW160 SERVO MOTOR Yaskawa
SGMP-04AW16S SGMP04AW16S SERVO MOTOR Yaskawa
SGMP-04AWG10 SGMP04AWG10 SERVO MOTOR Yaskawa
SGMP-04AWYR52 SGMP04AWYR52 SERVO MOTOR Yaskawa
SGMP-04AWYR62 SGMP04AWYR62 SERVO MOTOR Yaskawa
SGMP-04U314CM SGMP04U314CM 200VSERVO MOTOR yaskawa
SGMP-04U314M SGMP04U314M SERVO MOTOR Yaskawa
SGMP-04U314SPT SGMP04U314SPT SERVO MOTOR Yaskawa
SGMP-04U316C SGMP04U316C SERVO MOTOR Yaskawa
SGMP-04U3AP10 SGMP04U3AP10 SERVO MOTOR Yaskawa
SGMP-04UW14 SGMP04UW14 SERVO MOTOR Yaskawa
SGMP-04UW16CM SGMP04UW16CM 400W 200V 2.6AMP yaskawa
SGMP-04V314T SGMP04V314T 200VAC 400W yaskawa
SGMP-04V314T#ZL02 SGMP04V314T#ZL02 SERVO MOTOR yaskawa
SGMP-04V316CT SGMP04V316CT SERVO MOTOR Yaskawa
SGMP-04-V316CT SGMP04V316CT SERVO MOTOR Yaskawa
SGMP-04V3D14T SGMP04V3D14T SERVO MOTOR Yaskawa
SGMP-04V3YG11 SGMP04V3YG11 SERVO MOTOR Yaskawa
SGMP-08A312 SGMP08A312 SERVO MOTOR Yaskawa
SGMP-08A312b SGMP08A312b SERVO MOTOR Yaskawa
SGMP-08A314 SGMP08A314 SERVO MOTOR Yaskawa
SGMP-08A314B SGMP08A314B SERVO MOTOR Yaskawa
SGMP-08A314C SGMP08A314C SERVO MOTOR Yaskawa
SGMP-08A314S SGMP08A314S SERVO MOTOR Yaskawa
SGMP-08A3G32 SGMP08A3G32 SERVO MOTOR Yaskawa
SGMP-08A3te11 SGMP08A3te11 SERVO MOTOR Yaskawa
SGMP-08A3TE12 SGMP08A3TE12 SERVO MOTOR Yaskawa
SGMP-08A3TE21 SGMP08A3TE21 SERVO MOTOR Yaskawa
SGMP-08A3TE22 SGMP08A3TE22 SERVO MOTOR Yaskawa
SGMP-08A3TE31 SGMP08A3TE31 SERVO MOTOR Yaskawa
SGMP-08A3TE51 SGMP08A3TE51 SERVO MOTOR Yaskawa
SGMP-08AW12 SGMP08AW12 SERVO MOTOR Yaskawa
SGMP-08AW14 SGMP08AW14 SERVO MOTOR Yaskawa
SGMP-08AW16DP SGMP08AW16DP AC 750W 200V 4.1AMP yaskawa
SGMP-08AWG10 SGMP08AWG10 SERVO MOTOR Yaskawa
SGMP-08AWHG22 SGMP08AWHG22 AC 200V 750W 4.1AMP 3000RPM Yaskawa
SGMP-08AWYR11 SGMP08AWYR11 SERVO MOTOR Yaskawa
SGMP-08AWYR12 SGMP08AWYR12 SERVO MOTOR Yaskawa
SGMP-08AWYR32 SGMP08AWYR32 4.1AMP 750W 200V Yaskawa
SGMP-08AWYR33 SGMP08AWYR33 4.2A 200V 3000RPM 750W 2.39NM Yaskawa
SGMP-08AWYR41 SGMP08AWYR41 CUBE 1.01HP 200V EN STANDARD yaskawa
SGMP-08AWYR42 SGMP08AWYR42SERVO MOTOR yaskawa
SGMP-08TE31 SGMP08TE31 SERVO MOTOR Yaskawa
SGMP-08U314M SGMP08U314M SERVO MOTOR Yaskawa
SGMP-08Wyr12 SGMP08Wyr12 SERVO MOTOR Yaskawa
SGMP-08WYR33 SGMP08WYR33 SERVO MOTOR Yaskawa
SGMP-15A312 SGMP15A312 SERVO MOTOR Yaskawa
SGMP-15A314 SGMP15A314 SERVO MOTOR Yaskawa
SGMP-15A314M SGMP15A314M SERVO MOTOR Yaskawa
SGMP-15A3A4EPU SGMP15A3A4EPU SERVO MOTOR Yaskawa
SGMP-15A3G26BM SGMP15A3G26BM 7.5AMP 1500W 200V Yaskawa
SGMP-15A3G26M SGMP15A3G26M SERVO MOTOR Yaskawa
SGMP-15A3NT11 SGMP15A3NT11 SERVO MOTOR Yaskawa
SGMP-15AW12SP SGMP15AW12SP SERVO MOTOR Yaskawa
SGMP-15AWG12M SGMP15AWG12M SERVO MOTOR Yaskawa
SGMP-15AWHG11 SGMP15AWHG11 SERVO MOTOR Yaskawa
SGMP-15AWYR11 SGMP15AWYR11 1,5KW 200V 7,5AMP 4,77NM Yaskawa
SGMP-15AWYR12 SGMP15AWYR12 AC 3KRPM 1500W 200V 7,5AMP yaskawa
SGMP-15U314 SGMP15U314 SERVO MOTOR Yaskawa
SGMP-15V316C SGMP15V316C SERVO MOTOR Yaskawa
SGMP-A8A3TA11 SGMPA8A3TA11 SERVO MOTOR Yaskawa
SGMP-A8BW14B SGMPA8BW14B SERVO MOTOR Yaskawa
SGMP-O1AWA4SPU SGMPO1AWA4SPU SERVO MOTOR Yaskawa
SGMP-O2UW14M SGMPO2UW14M SERVO MOTOR Yaskawa
SGMP-U20314M SGMPU20314M SERVO MOTOR Yaskawa
SGMP-02W3026 SGMP02W3026 SERVO MOTOR Yaskawa
SGMP-04AWYR31 SGMP04AWYR31 SERVO MOTOR Yaskawa
SGMP-04AWYR32 SGMP04AWYR32 SERVO MOTOR Yaskawa
Motores elétricos e geradoresMotores elétricos, geradores, alternadores e alto-falantes são explicados por meio de animações e esquemas.
Esta é uma página de recursos dePhysclips, uma introdução multimídia multinível à física (baixe as animações nesta página).
|
Os esquemas mostrados aqui são idealizados, para tornar os princípios óbvios.Por exemplo, a animação à direita tem apenas um loop de arame, sem rolamentos e uma geometria muito simples.Motores reais usam os mesmos princípios, mas sua geometria geralmente é complicada.Se você já entende os princípios básicos dos vários tipos de motores, pode querer ir direto para os casos mais complexos e sutis descritos emComo funcionam os motores elétricos reais, pelo professor John Storey.
|
|
motores DCUm motor DC simples tem uma bobina de fio que pode girar em um campo magnético.A corrente na bobina é fornecida por meio de duas escovas que fazem contato móvel com um anel dividido.A bobina encontra-se em um campo magnético constante.As forças exercidas nos fios condutores de corrente criam umatorquena bobina.

A força F sobre um fio de comprimento L conduzindo uma corrente i em um campo magnético B é iLB vezes o seno do ângulo entre B e i, que seria de 90° se o campo fosse uniformemente vertical.A direção de F vem da regra da mão direita*, conforme mostrado aqui.As duas forças mostradas aqui são iguais e opostas, mas são deslocadas verticalmente, então elas exercem umatorque.(As forças nos outros dois lados da bobina agem ao longo da mesma linha e, portanto, não exercem torque.)
- * Vários nmemônicos diferentes são usados para lembrar a direção da força.Alguns usam a mão direita, outros a esquerda.Para alunos que sabemmultiplicação vetorial, é fácil usar a força de Lorentz diretamente:F= qvxB, de ondeF= eudLxB.Essa é a origem do diagrama mostrado aqui.
A bobina também pode ser considerada como um dipolo magnético, ou um pequeno eletroímã, conforme indicado pela seta SN: enrole os dedos da mão direita na direção da corrente, e o polegar é o polo Norte.No esboço à direita, o eletroímã formado pela bobina do rotor é representado como um ímã permanente, e o mesmo torque (Norte atrai Sul) é visto como aquele que atua para alinhar o ímã central.
- Por toda parte, usamos azul para o pólo Norte e vermelho para o Sul.Esta é apenas uma convenção para deixar a orientação clara: não há diferença no material em nenhuma das extremidades do ímã e geralmente não são pintadas de cores diferentes.
Observe o efeito doescovasnoanel dividido.Quando o plano da bobina giratória atinge a horizontal, as escovas quebram o contato (não se perde muito, porque esse é o ponto de torque zero de qualquer maneira - as forças agem para dentro).O momento angular da bobina a leva além desse ponto de interrupção e a corrente flui na direção oposta, o que inverte o dipolo magnético.Assim, após passar o ponto de quebra, o rotor continua girando no sentido anti-horário e começa a se alinhar na direção oposta.No texto a seguir, usarei amplamente a imagem do 'torque em um ímã', mas lembre-se de que o uso de escovas ou de corrente alternada pode fazer com que os pólos do eletroímã em questão troquem de posição quando a corrente muda de direção.
O torque gerado ao longo de um ciclo varia com a separação vertical das duas forças.Depende, portanto, do seno do ângulo entre o eixo da bobina e o campo.No entanto, por causa do anel dividido, é sempre no mesmo sentido.A animação abaixo mostra sua variação no tempo, e você pode pará-la a qualquer momento e verificar a direção aplicando a regra da mão direita.
Motores e geradoresAgora, um motor DC também é um gerador DC.Confira a próxima animação.A bobina, o anel bipartido, as escovas e o ímã são exatamente o mesmo hardware do motor acima, mas a bobina está sendo girada, o que gera uma fem.
Se você usar energia mecânica para girar a bobina (N voltas, área A) em velocidade angular uniforme ω no campo magnéticoB, produzirá uma fem senoidal na bobina.fem (uma fem ou força eletromotriz é quase a mesma coisa que uma voltagem).Seja θ o ângulo entreBe a normal à bobina, então o fluxo magnético φ é NAB.cos θ.A lei de Faraday dá:
A animação acima seria chamada de gerador DC.Como no motor DC, as extremidades da bobina se conectam a um anel bipartido, cujas duas metades são contatadas pelas escovas.Observe que as escovas e o anel dividido 'retificam' a fem produzida: os contatos são organizados para que a corrente flua sempre na mesma direção, porque quando a bobina gira além do ponto morto, onde as escovas encontram a lacuna no anel, as conexões entre as extremidades da bobina e os terminais externos são invertidas.A fem aqui (desprezando o ponto morto, que ocorre convenientemente em zero volts) é |NBAω sen ωt|, conforme esboçado.
um alternadorSe quisermos AC, não precisamos de retificação, portanto, não precisamos de anéis divididos.(Esta é uma boa notícia, porque os anéis divididos causam faíscas, ozônio, interferência de rádio e desgaste extra. Se você quiser CC, geralmente é melhor usar um alternador e retificar com diodos.)Na próxima animação, os dois pincéis entram em contato com dois anéis contínuos, de modo que os dois terminais externos estão sempre conectados às mesmas extremidades da bobina.O resultado é a fem senoidal não retificada dada por NBAω sen ωt, que é mostrada na próxima animação.
Este é um gerador de CA.As vantagens deGeradores AC e DCsão comparados em uma seção abaixo.Vimos acima que um motor DC também é um gerador DC.Da mesma forma, um alternador também é um motor CA.No entanto, é bastante inflexível.(VerComo funcionam os motores elétricos reaispara mais detalhes.)
EMF traseiroAgora, como mostram as duas primeiras animações, motores DC e geradores podem ser a mesma coisa.Por exemplo, os motores dos trens tornam-se geradores quando o trem está desacelerando: eles convertem energia cinética em energia elétrica e devolvem a energia à rede.Recentemente, alguns fabricantes começaram a fabricar automóveis racionalmente.Nesses carros, os motores elétricos usados para acionar o carro também são usados para carregar as baterias quando o carro está parado - isso é chamado de frenagem regenerativa.Então aqui está um corolário interessante.Todo motor é um gerador.Isso é verdade, em certo sentido, mesmo quando funciona como um motor.A fem que um motor gera é chamada deemf de volta.A fem traseira aumenta com a velocidade, por causa da lei de Faraday.Assim, se o motor estiver sem carga, ele gira muito rápido e acelera até que a contrafem, mais a queda de tensão por perdas, iguale a tensão de alimentação.O emf traseiro pode ser pensado como um 'regulador': ele para o motor de girar infinitamente rápido (salvando assim os físicos algum embaraço).Quando o motor está carregado, a fase da tensão fica mais próxima da corrente (começa a parecer resistiva) e essa resistência aparente dá uma tensão.Portanto, a fem traseira necessária é menor e o motor gira mais lentamente.(Para adicionar a fem traseira, que é indutiva, ao componente resistivo, você precisa adicionar tensões que estão fora de fase. Consultecircuitos CA.)
As bobinas geralmente têm núcleos
Na prática (e ao contrário dos diagramas que desenhamos), os geradores e os motores CC geralmente têm um núcleo de alta permeabilidade dentro da bobina, de modo que grandes campos magnéticos são produzidos por correntes modestas.Isso é mostrado à esquerda na figura abaixo, na qual oestatores(os ímãs que são estacionários) são ímãs permanentes.
Motores 'universais'
Os ímãs do estator também podem ser feitos como eletroímãs, como mostrado acima à direita.Os dois estatores são enrolados na mesma direção para dar um campo na mesma direção e o rotor tem um campo que se inverte duas vezes por ciclo porque está conectado a escovas, que são omitidas aqui.Uma vantagem de ter estatores enrolados em um motor é que se pode fazer um motor que funcione em CA ou CC, o chamadomotor universal.Quando você aciona esse motor com CA, a corrente na bobina muda duas vezes em cada ciclo (além das mudanças das escovas), mas a polaridade dos estatores muda ao mesmo tempo, então essas mudanças se cancelam.(Infelizmente, no entanto, ainda existem escovas, embora eu as tenha escondido neste esboço.) Para obter as vantagens e desvantagens do imã permanente versus estatores bobinados, consulteabaixo de.Veja tambémmais sobre motores universais.
Construir um motor simplesPara construir este motor simples, mas estranho, você precisa de dois ímãs bastante fortes (ímãs de terras raras com cerca de 10 mm de diâmetro seriam bons, assim como ímãs de barra maiores), algum fio de cobre rígido (pelo menos 50 cm), dois fios com clipes de crocodilo em cada extremidade, uma bateria de lanterna de seis volts, duas latas de refrigerante, dois blocos de madeira, fita adesiva e um prego afiado.
Faça a bobina de fio de cobre rígido, para que não precise de nenhum suporte externo.Enrole 5 a 20 voltas em um círculo de cerca de 20 mm de diâmetro e faça com que as duas extremidades apontem radialmente para fora em direções opostas.Essas extremidades serão o eixo e os contatos.Se o fio tiver laca ou isolamento de plástico, descasque-o nas pontas.
| Os suportes do eixo podem ser de alumínio, de forma que façam contato elétrico.Por exemplo, faça furos em uma lata de refrigerante com um prego, conforme mostrado.Posicione os dois ímãs, de norte a sul, de modo que o campo magnético passe pela bobina em ângulos retos com os eixos.Prenda ou cole os ímãs nos blocos de madeira (não mostrados no diagrama) para mantê-los na altura certa, depois mova os blocos para colocá-los em posição, bem próximos da bobina.Gire a bobina inicialmente de modo que o fluxo magnético através da bobina seja zero, conforme mostrado no diagrama. Agora pegue uma bateria e dois fios com clipes de crocodilo.Conecte os dois terminais da bateria aos dois suportes metálicos da bobina e ela deverá girar.
Observe que este motor tem pelo menos um 'ponto morto': ele geralmente para na posição em que não há torque na bobina.Não deixe ligado por muito tempo: isso vai descarregar a bateria rapidamente.
O número ideal de voltas na bobina depende da resistência interna da bateria, da qualidade dos contatos de suporte e do tipo de fio, portanto, você deve experimentar diferentes valores.
Como mencionado acima, este também é um gerador, mas é muito ineficiente.Para fazer uma fem maior, use mais voltas (talvez seja necessário usar arame mais fino e uma armação para enrolá-la). Você pode usar, por exemplo, uma furadeira elétrica para girá-la rapidamente, conforme mostrado no esboço acima.Use um osciloscópio para ver a fem gerada.É AC ou DC?
Este motor não tem anel dividido, então por que funciona em CC?Simplificando, se fosse exatamente simétrico, não funcionaria.No entanto, se a corrente for um pouco menor em um meio ciclo do que no outro, então o torque médio não será zero e, por girar razoavelmente rápido, o momento angular adquirido durante o meio ciclo com maior corrente o leva pelo meio ciclo quando o torque é na direção oposta.Pelo menos dois efeitos podem causar uma assimetria.Mesmo que os fios estejam perfeitamente descarnados e os fios limpos, é improvável que a resistência de contato seja exatamente igual, mesmo em repouso.Além disso, a própria rotação faz com que o contato seja intermitente, portanto, se houver saltos mais longos durante uma fase, essa assimetria é suficiente.Em princípio, você poderia descascar parcialmente os fios de forma que a corrente fosse zero em meio ciclo.
|
Uma versão alternativa do motor simples, por James Taylor.
|
Um motor ainda mais simples(uma que também é muito mais simples de entender!)motor homopolar.
motores CACom correntes CA, podemos inverter as direções do campo sem precisar usar escovas.Esta é uma boa notícia, porque podemos evitar o arco elétrico, a produção de ozônio e a perda ôhmica de energia que as escovas podem acarretar.Além disso, como as escovas fazem contato entre superfícies móveis, elas se desgastam.A primeira coisa a fazer em um motor CA é criar um campo rotativo.A CA 'comum' de um soquete de 2 ou 3 pinos é CA monofásica - tem uma única diferença de potencial senoidal gerada entre apenas dois fios - o ativo e o neutro.(Observe que o fio terra não conduz corrente, exceto no caso de falhas elétricas.) Com AC monofásica, pode-se produzir um campo giratório gerando duas correntes que estão fora de fase usando, por exemplo, um capacitor.No exemplo mostrado, as duas correntes estão 90° fora de fase, então a componente vertical do campo magnético é senoidal, enquanto a horizontal é cosusoidal, como mostrado.Isso dá um campo girando no sentido anti-horário.
(* Me pediram para explicar isso: do simplesteoria AC, nem as bobinas nem os capacitores têm a tensão em fase com a corrente.Em um capacitor, a tensão é máxima quando a carga termina de fluir para o capacitor e está prestes a começar a fluir.Assim, a tensão está atrás da corrente.Em uma bobina puramente indutiva, a queda de tensão é maior quando a corrente está mudando mais rapidamente, o que também ocorre quando a corrente é zero.A tensão (queda) está à frente da corrente.Nas bobinas do motor, o ângulo de fase é bem menor que 90¡, porque a energia elétrica está sendo convertida em energia mecânica.)
Nesta animação, os gráficos mostram a variação no tempo das correntes nas bobinas vertical e horizontal.O gráfico dos componentes do campo Bxe Bymostra que a soma vetorial desses dois campos é um campo rotativo.A figura principal mostra o campo rotativo.Também mostra a polaridade dos ímãs: como acima, o azul representa o pólo Norte e o vermelho o pólo Sul.
Se colocarmos um ímã permanente nesta área de campo rotativo, ou se colocarmos uma bobina cuja corrente sempre corre na mesma direção, isso se torna ummotor síncrono.Sob uma ampla gama de condições, o motor girará na velocidade do campo magnético.Se tivermos muitos estatores, em vez de apenas os dois pares mostrados aqui, poderíamos considerá-lo como um motor de passo: cada pulso move o rotor para o próximo par de polos acionados.Por favor, lembre-se do meu alerta sobre a geometria idealizada: motores de passo reais têm dezenas de pólos e geometrias bastante complicadas!
motores de induçãoAgora, como temos um campo magnético variável no tempo, podemos usar a fem induzida em uma bobina – ou mesmo apenas as correntes parasitas em um condutor – para transformar o rotor em um ímã.É isso mesmo, uma vez que você tenha um campo magnético rotativo, basta colocar um condutor e ele gira.Isso dá vários dosvantagens dos motores de indução: sem escovas ou comutador significa fabricação mais fácil, sem desgaste, sem faíscas, sem produção de ozônio e nenhuma perda de energia associada a eles.Abaixo à esquerda está um esquema de um motor de indução.(Para fotos de motores de indução reais e mais detalhes, consultemotores de indução.)
A animação à direita representa ummotor de gaiola de esquilo.A gaiola de esquilo tem (nesta geometria simplificada, pelo menos!) dois condutores circulares unidos por várias barras retas.Quaisquer duas barras e os arcos que as unem formam uma bobina – conforme indicado pelos traços azuis na animação.(Apenas dois dos muitos circuitos possíveis foram mostrados, para simplificar.)
Este esquema sugere por que eles podem ser chamados de motores de gaiola de esquilo.A realidade é outra: para fotos e mais detalhes, vejamotores de indução.O problema com os motores de indução e gaiola de esquilo mostrados nesta animação é que os capacitores de alto valor e alta tensão nominal são caros.Uma solução é o motor de 'polo sombreado', mas seu campo de rotação tem algumas direções onde o torque é pequeno e tem uma tendência de rodar para trás sob algumas condições.A maneira mais simples de evitar isso é usar motores de múltiplas fases.
Motores de indução CA trifásicosA monofásica é usada em aplicações domésticas para aplicações de baixa potência, mas tem algumas desvantagens.Uma delas é que ele desliga 100 vezes por segundo (você não percebe que as lâmpadas fluorescentes piscam nessa velocidade porque seus olhos são muito lentos: mesmo 25 imagens por segundo na TV são rápidas o suficiente para dar a ilusão de movimento contínuo. ) A segunda é que torna difícil produzir campos magnéticos rotativos.Por esta razão, alguns dispositivos domésticos de alta potência (vários kW) podem exigir instalação trifásica.As aplicações industriais usam trifásico extensivamente, e o motor de indução trifásico é um burro de carga padrão para aplicações de alta potência.Os três fios (sem contar o terra) carregam três possíveis diferenças de potencial que estão defasadas entre si em 120°, conforme mostrado na animação abaixo.Assim, três estatores fornecem um campo de rotação suave.(Veresse linkpara mais informações sobre alimentação trifásica.)
Se alguém colocar um imã permanente em tal conjunto de estatores, ele se torna ummotor trifásico síncrono.A animação mostra uma gaiola de esquilo, na qual, para simplificar, apenas um dos muitos loops de corrente induzida é mostrado.Sem carga mecânica, ele gira praticamente em fase com o campo rotativo.O rotor não precisa ser uma gaiola de esquilo: na verdade, qualquer condutor que carregue correntes parasitas irá girar, tendendo a seguir o campo rotativo.Este arranjo pode dar umamotor de induçãocapaz de alta eficiência, alta potência e altos torques em uma faixa de taxas de rotação.
Motores linearesUm conjunto de bobinas pode ser usado para criar um campo magnético que translada, em vez de girar.O par de bobinas na animação abaixo é pulsado, da esquerda para a direita, de modo que a região do campo magnético se move da esquerda para a direita.Um permanente ou eletroímã tenderá a seguir o campo.O mesmo aconteceria com uma simples placa de material condutor, porque as correntes parasitas induzidas nela (não mostradas) compreendem um eletroímã.Alternativamente, poderíamos dizer que, a partir da lei de Faraday, uma fem na placa de metal é sempre induzida de modo a se opor a qualquer mudança no fluxo magnético, e as forças nas correntes impulsionadas por essa fem mantêm o fluxo na placa quase constante.(As correntes parasitas não são mostradas nesta animação.) |

 Por favor verifique seu email!
Por favor verifique seu email!