YASKAWA SGMAH Sigma II 0,91A 100W AC SERVO MOTOR 3000RMP SGMAH-01AAA41-Y1
Especificações
Fabricante: Yaskawa
Número do produto: SGMAH-01AAA41-Y1
Descrição: SGMAH-01AAA41-Y1 é um Servo Motors-AC fabricado pela Yaskawa
Tipo de servomotor: SGMAH Sigma II
Potência nominal: 10 W (0,07 CV)
Fornecimento de energia: 200 V
Especificações do codificador: codificador incremental de 13 bits (2048 x 4); padrão
Nível de revisão: Norma
Especificações do eixo: eixo recto sem passagem de chave
Acessórios: padrão; sem travão
Opção: Nenhuma
Tipo: nenhum
Outros produtos superiores
Motor Yasakawa, motorista SG- Mitsubishi Motor HC-, HA-
Módulos Westinghouse 1C, 5X- Emerson VE, KJ-
Motor Honeywell TC-TK-Fanuc A0-
Transmissor Rosemount 3051- Transmissor Yokogawa EJA-
SProdutos imular
SGMAH-A5A1A21
SGMAH-A1A2C
SGMAH-A5A1A2
SGMAH-A5A1A41D
SGMAH-A5A1A4C
SGMAH-A5A1A-YR11
SGMAH-A5A1A-YR31
SGMAH-A5A1F21
SGMAH-A5A1F2C
SGMAH-A5A1F2CD
SGMAH-A5A1F41
SGMAH-A5A4F41
SGMAH-A5AAA21
SGMAH-A5AAA2B
SGMAH-A5AAA61D
SGMAH-A5AAA61D-OY
SGMAH-A5AAAG161
SGMAH-A5AAAG761
SGMAH-A5AAAG761D
SGMAH-A5AAAH161
Os motores passo a passo podem frequentemente exibir um fenômeno referido como ressonância em certas taxas de passo.Isto pode ser visto como uma perda súbita ou queda de binário em certas velocidades que podem resultar em passos perdidos ou perda de sincronicidadeOcorre quando a taxa de pulso de passo de entrada coincide com a frequência de oscilação natural do rotor.Muitas vezes, há uma área de ressonância em torno da região de 100 - 200 pps e também uma na região de alta taxa de pulso de passoOs fenômenos de ressonância de um motor passo-a-passo provêm da sua construção básica e, portanto,
A redução da carga é uma das principais causas da perda de peso, mas não é possível eliminá-la completamente.
Acionando o motor em modos de meio ou micro passo.
Quando um pulso passo é aplicado a um motor passo, o rotor se comporta de uma forma definida pela curva acima.
O tempo de passo t é o tempo que o eixo do motor leva para girar um ângulo de passo uma vez aplicado o primeiro pulso de passo.
Este tempo de passo depende muito da relação entre o binário e a inércia (carga), bem como do tipo de condutor utilizado.
Uma vez que o binário é uma função do deslocamento, segue-se que a aceleração também será.Quando se move em grandes incrementos de passo, um alto binário é desenvolvido e, consequentemente, uma alta aceleraçãoO tempo de estabilização T é o tempo necessário para que essas oscilações ou toques cessem. Em certas aplicações este fenômeno pode ser indesejável.É possível reduzir ou eliminar este comportamento por micro-stepping o motor passoPara mais informações sobre o microstep, consulte a nota sobre o microstep.

 Por favor verifique seu email!
Por favor verifique seu email!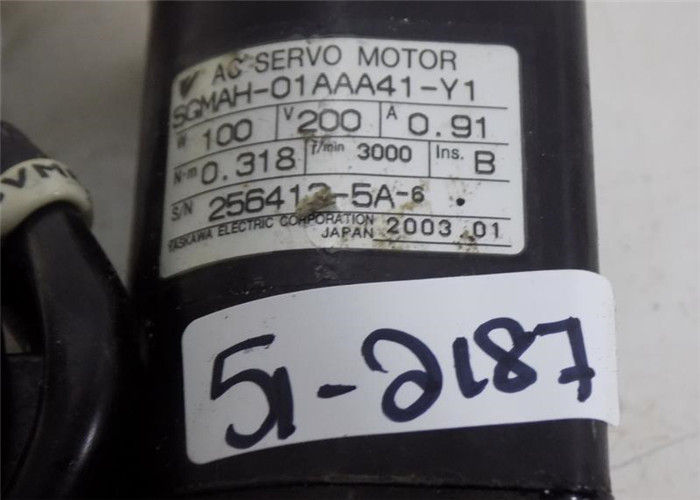
Avaliação Geral
Instantâneo da Avaliação
A seguir, a distribuição de todas as classificaçõesTodos os comentários