SERVO MOTOR 0.095N.m industrial elétrico 0.44A SGMAH-A3B1A21 da C.A. de Yaskawa 30W InsB
Específicos do artigo
Modelo SGMAH-A3B1A21
Tipo de produto servo motor da C.A.
Saída avaliado 30w
Torque0.095 avaliado nanômetro
Velocidade avaliado 3000RPM
Tensão de fonte de alimentação 200vAC
0.44Amps atual avaliado
OUTROS PRODUTOS SUPERIORES
Motor de Yasakawa, motor HC- do SG Mitsubishi do motorista, HA
Módulos 1C- de Westinghouse, 5X- Emerson VE, KJ
Honeywell TC, motor A0- do TK Fanuc
Transmissor 3051 de Rosemount - transmissor EJA- de Yokogawa
Pessoa de contato: Anna
E-mail: wisdomlongkeji@163.com
Telefone celular: +0086-13534205279
PRODUTOS SIMILARES
SGMPH-15AAA21 SGMPH-15A1A-YR11 USAPEM-07YR23 SGM-01U3B4L
SGM-08A314S SGMAH-A3A1A4S SGMAH-02A1A4C SGMAS-01A2A41
SGMAH-A6AAA21 SGM-02VGNK13 SGMAS-A5ACA2C SGMAS-01ACA2C
SGMAS-02ACA21 SGMG-09A2A SGME-01AF14 SGM-01A314
SGMAH-01BAA4C SGM-02B314 SGMAS-06ACA2C SGMAS-07ARB-AB11
SGMAH-08A1A21 SGMG-05A2A SGMG-20A2AB SGMG-20A2A
SGMP-02B314C SGMPH-04AAA21 SGMAS-04A2A-FJ13 SGM-02U3B4L
SGM-02A314 SGMSH-20ACA21 SGMPH-15AAA-TE21 SGMPH-01AAE4CD
SGM-01AWSU12 SGM-01AGSU11 SGME-01AF14 SGM-02AGSU11
SGMP-04U314M SGMAH-04AAA-FJ12 USAREM-02CF2 USAREM-08FJ11
SGMGH-05ACA21 SGM-02U3B2L USASEM-18YR24 SGMAH-04AAAH761
SGMMJ-A3BABA1 SGMP-01U314CM SGM-01BX SGM-A3AFJ71 USAREM-02CE2KX
SGMS-55ASA SGMPH-01AAE-YA11 SGM-08AWFJ83 SGM-08AWFJ83X
SGMG-09AWAAB SGMS-15AWA-HG13 SGMG-05AWAAB SGMP-15AW16DP
USAREM-03DE2USAQEM-03-SU21 USAQEM-A6-SU31 USAQEM-05AA2KX USADEM-13-NT25
SGMP-04AS14 SGML-04AF12C SGMP-04A314E SGMPH-04A1E-TM21
SGME-04AF12 UGTMEM-03LSK21 SGM-02A612B SGMAH-A5A1A41
SGMPH-08AAA21 SGMSH-20ACA-FJ12
SGM-A5A312 SGM-A3A314 SGM-A3A321 SGMSH-15A2A21
USAREM-02CE2 SGM-02A5FJ12 SGMSH-08A1A4D SGM-08A312P
SGM-01B312 SGMAS-01A2A-AD11 SGMp-04AAA21
SGMAH-02A1F-AP11 SGMAH-A5AAA41 USAREM-03BE2KX SGMG-1AA2ABC
SGMGH-55DCA6C SGMG-30ASA SGMG-20VSAA3 SGMG-05AWAD SGMG-09ASA
SGMG-20VSR SGMG-09V2RC3 SGMG-20AWAA3 SGMG-30V2AAB SGMKS-20A3A21X2
Que acontece quando o sistema está no movimento? Considere que A2 é uma combinação típica da movimentação e do motor. O erro E2 fará com que a movimentação corra e a velocidade em que corre é proporcional ao valor do E2. O E2 maior é, mais rapidamente o motor irá. Isto diz a um que a saída (feedback) não será precisamente coincidente com o comando quando no movimento e, de fato, na saída F2 se retardará o comando C2 pela quantidade do erro E2. Mais rapidamente vai, mais será a retardação. Isto é mau para a boa operação do mestre/escravo, que exige que o escravo F2 precisamente seguir o F1 mestre.
Se um módulo de software (s) é introduzido entre o F1 e o C2 um número de coisas podem ser realizadas.

Desde que o ganho do laço A2 do escravo é sabido, o valor do E2 pode ser previsto em toda a velocidade desejada. Isto significa que o comando C2 pode ser ajustado por esse erro computado E2 para causar
F2 a ser coincidente com o F1. O módulo de software (s) será projetado de modo que: C2 = F1 + E2
Quando isto é realizado, F1 e o F2 são coincidentes.
Também, desde que S é um módulo de software, é possível manipulá-lo em diversas outras maneiras de fornecer a flexibilidade mencionada mais cedo.
Por exemplo, se nós deixamos S = (•K) onde K pode ser constante, a seguir existe a totalmente
relação flexível da engrenagem que pode ser mudada na vontade.
O motor deslizante Advantagesand prejudica
Vantagens
1. O ângulo da rotação do motor é proporcional ao pulso de entrada.
2. O motor tem o torque completo na paralisação (se os enrolamentos são energizados)
3. posicionamento e repetibilidade precisos do movimento desde que os bons motores deslizantes têm uma precisão de
3 – 5% de uma etapa e deste erro é não cumulativo de uma etapa ao seguinte.
4. resposta excelente a iniciar a parada/inverter.
5. muito seguro desde que não há nenhuma escova de contato no motor. Consequentemente a vida do motor é simplesmente dependente da vida do rolamento.
6. A resposta de motores aos pulsos de entrada digital fornece o controle do aberto-laço, fazendo o motor mais simples
e menos caro para controlar.
7. É possível conseguir a rotação síncrono muito de baixa velocidade com uma carga que seja acoplada diretamente ao
eixo.
8. Uma vasta gama de velocidades rotatórias pode ser realizada porque a velocidade é proporcional à frequência do
pulsos de entrada.

 Por favor verifique seu email!
Por favor verifique seu email!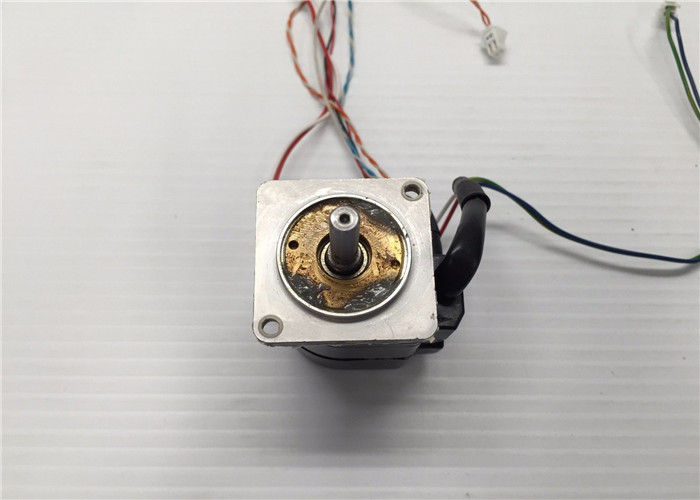
Avaliação Geral
Instantâneo da Avaliação
A seguir, a distribuição de todas as classificaçõesTodos os comentários