Sigma industrial de Yaskawa 2 SERVO MOTOR novo SGMPH-01A1A41 da C.A. da série 100W
DESCRIÇÃO
- Yaskawa elétrico
- Servo motor da C.A.
- Sigma 2 (séries de Σ-II)
SEPCIFICATIONS
| Fabricante |
Yaskawa/MagneTek/Saftronics/Omron |
| Série |
Sigma 2 (séries de Σ-II) |
| Peso |
5KG |
PRODUTOS SIMILARES
| SGMPH-02A1A-YR12 |
SGMPH-02A1A-YR21 |
| SGMPH-02A1A-YR31 |
SGMPH-02A1A-YR32 |
| SGMPH-02A2A-YR12 |
SGMPH-02A2A-YR21 |
| SGMPH-02AAA2B |
SGMPH-02AAA2C |
| SGMPH-02AAA2E |
SGMPH-02AAA2E |
| SGMPH-02AAA4B |
SGMPH-02AAA61 |
| SGMPH-02BAA21 |
SGMPH-02BAA41 |
| SGMPH-04A1A21 |
SGMPH-02BAAG161 |
| SGMPH-04A1A2B |
SGMPH-04A1A2C |
| SGMPH-04A1A41 |
SGMPH-04A1A4B |
Pessoa de contato: Anna
E-mail: wisdomlongkeji@163.com
Telefone celular: +0086-13534205279
OUTROS PRODUTOS SUPERIORES
| Motor de Yasakawa, SG do motorista |
Motor HC- de Mitsubishi, HA |
| Módulos 1C- de Westinghouse, 5X- |
Emerson VE, KJ |
| Honeywell TC, TK |
Módulos IC de GE - |
| Motor A0- de Fanuc |
Transmissor EJA- de Yokogawa |
A presença deste material alto da permeabilidade faz com que o fluxo magnético seja limitado geralmente aos trajetos definido pela estrutura do estator na mesma forma que as correntes são limitadas aos condutores de um circuito eletrônico. Isto serve para concentrar o fluxo nos polos do estator.
Figure o princípio 4. de um motor do ímã do disco desenvolvido por Portescap.= N N N N S S S 3
Figura 5. trajeto do fluxo magnético através de um motor deslizante do dois-polo com uma retardação entre o rotor e o estator.
Figura motores deslizantes da ferida unipolar e bipolar de 6. a saída do torque produzida pelo motor é proporcional à intensidade do fluxo magnético gerado quando o enrolamento é energizado.
O relacionamento básico que define a intensidade do fluxo magnético é definido perto:
H = (÷ l do × de N i) onde:
N = o número de voltas de enrolamento
i = atual
H = intensidade de campo magnético
l = comprimento de trajeto do fluxo magnético
Este relacionamento mostra que a intensidade do fluxo magnético e consequentemente o torque é proporcional a
o número de voltas de enrolamento e do atual e do inversamente proporcional ao comprimento do trajeto do fluxo magnético.
Deste relacionamento básico um pode ver que o mesmo motor deslizante de tamanho de quadro poderia ter capacidades muito diferentes da saída do torque simplesmente mudando os parâmetros de enrolamento. Mais informações detalhadas em como os parâmetros de enrolamento afetar a capacidade da saída do motor podem ser encontrados na nota de aplicação autorizada de “princípios do circuito movimentação”.
Elementos de configuração
(a) o controlador de The do controlador é o anfitrião da rede de SynqNet. Deve somente haver um controlador pela rede.
(b) os nós um nó são um escravo e não o controlador, salvo indicação em contrário.
(c) terminal um conector opcional do laço de retorno colocado na extremidade de uma corrente do nó em uma topologia da corda.
Topologia
SynqNet apoia uma topologia em anel onde os nós de rede sejam conectados em série de volta ao controlador de SynqNet. Em uma topologia em anel, se qualquer um cabo ou nó falham, a rede reorientará dados de pacote em torno da ruptura e notificará a aplicação com um evento. O lugar da ruptura pode ser determinado pela aplicação.
A topologia da corda (aberta ou terminada) é apoiada igualmente onde os nós de rede não são conectados de volta ao controlador de SynqNet. Se um cabo quebra, os nós rio abaixo da ruptura já não serão enviar capaz/para receber pacotes para/desde o controlador. A vantagem de usar um terminal no último nó é que o tempo da iniciação da rede está reduzido, porque o controlador pode deterministically encontrar o último nó em uma rede. Ambos os tipos da topologia da corda não apoiam a recuperação de falha.
As respostas cíclicas todas as respostas cíclicas são recebidas cada ciclo de controle e estão disponíveis no amortecedor da resposta do nó.
(1) mostras prontas da movimentação que as comunicações são ativas. Válido em todas as vezes.
(2) mostras prontas do codificador que o codificador de série se está comunicando corretamente no modo síncrono. Válido quando a resposta pronta da movimentação aparecer.
(3) ampères puseram mostras que a tensão do motor está disponível para conduzir o servo. Válido quando a resposta pronta da movimentação aparecer.
servo (de 4) nas mostras que o servo é permitido ou deficiente. Não será ajustado se a movimentação é deficiente tampouco girando o PWM fora ou da travagem dinâmica. Válido quando a movimentação se apronta é ajustado.
(5) torça o limite mostra que a referência do torque está sobre o limite do torque. Válido quando a resposta pronta da movimentação aparecer.
(6) o aviso adverte que as precauções devem ser tomadas para impedir uma falha ou um erro. Válido em todas as vezes.
a falha (de 7) mostra que uma falha interrompeu o amplificador. Para determinar a causa da falha, o código de erro precisa de ser lido usando uma operação de memória. Válido em todas as vezes.
o feedback da posição (de 8) retorna um valor de 32 bits da posição em cada ciclo de controle.
(9) Monitor_A/torque Echo Shows que o valor de torque em cada ciclo de controle está retornado.
(10) Monitor_C/dados da Multi-volta retorna um valor de dados de 16 bits da multi-volta.


 Por favor verifique seu email!
Por favor verifique seu email!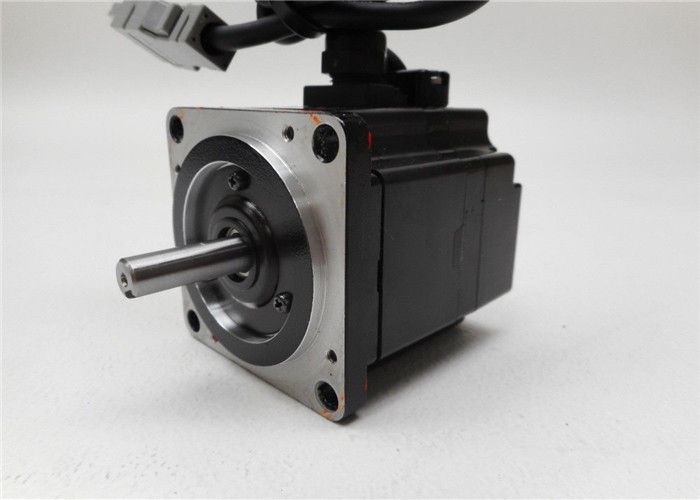
Avaliação Geral
Instantâneo da Avaliação
A seguir, a distribuição de todas as classificaçõesTodos os comentários